Title here
Summary here
In this article, I will give a brief guide on what the ellipsoid method is. A good reference would be the note by Sébastien Bubeck 1.
I will first give a high-level breakdown on why this algorithm works, then briefly write about how mathematically the ellipsoids are manipulated. Another optimization algorithm that is seldomly used in practice, but conceptually closely-related is the center of gravity method. This is explored here.
Optimization Problem. Minimize a convex function
 defined over a convex body
defined over a convex body
 .
.
General results on convex analysis guarantees that
 attains minimum on some
attains minimum on some
 ; let us also write the optimal value as
; let us also write the optimal value as
 .
.
Assumptions. For
 , we make the assumptions:
, we make the assumptions:
 for some
for some
 .
. for some
for some
 ,
,
 ; here
; here
 is the open ball centered at
is the open ball centered at
 with radius
with radius
 .
.Available Oracles. We assume the following 0th and 1st-order oracles available to us:
 , we can ask for a direction
, we can ask for a direction
 with
with
 , where
, where
 is the half space
is the half space
 .
. , we can ask for a direction
, we can ask for a direction
 .
.Intuitively, points close to
 shouldn’t be too bad. Although we do not know
, it still makes sense to consider the following construction: Given
shouldn’t be too bad. Although we do not know
, it still makes sense to consider the following construction: Given
 , define the set (which can be thought of shrinking towards
):
, define the set (which can be thought of shrinking towards
):

On this set, we have the function bounds and volume bounds on
 :
:


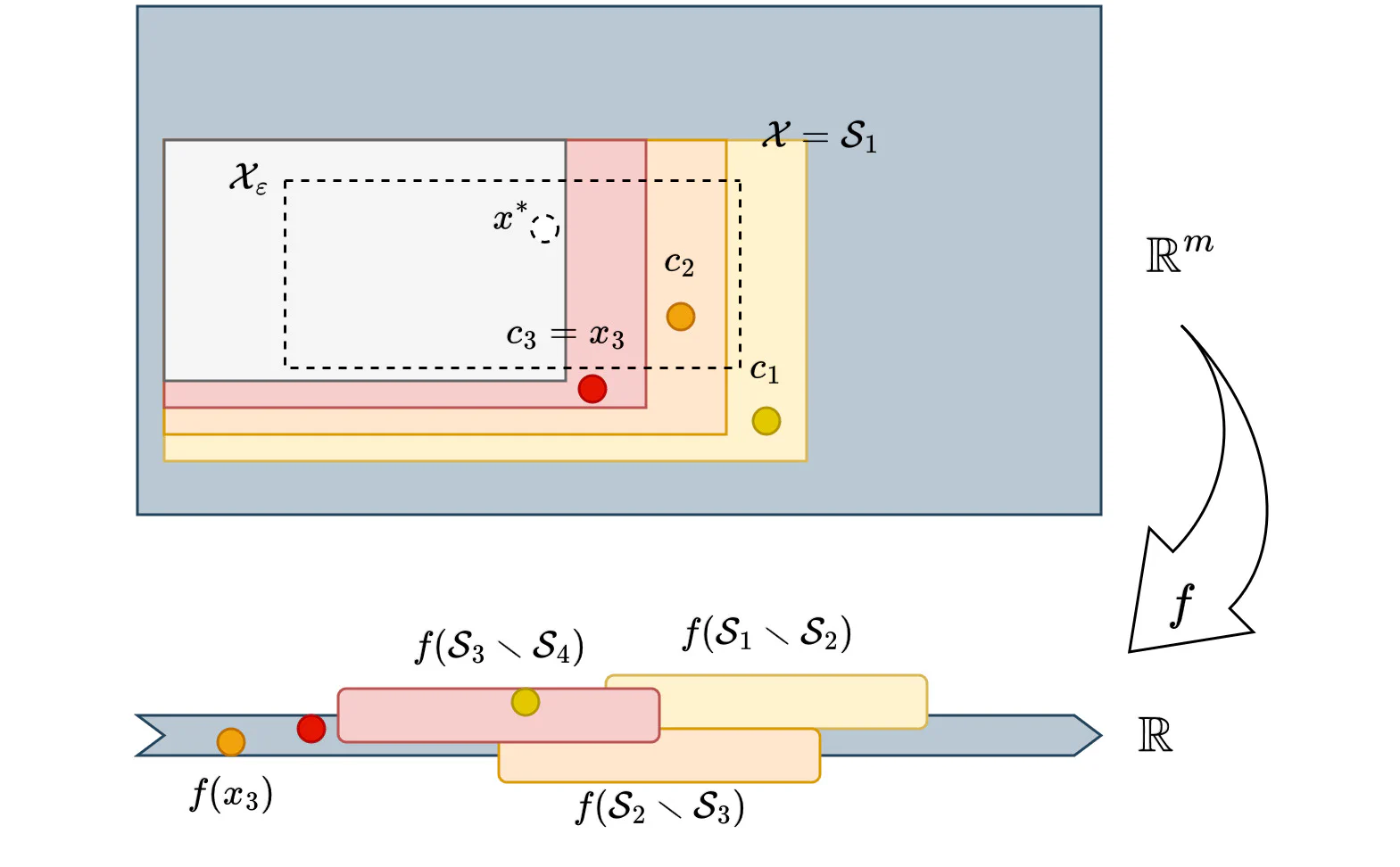
by utilizing our assumptions on convexity, volume and value bounds. In this sense, we have the following general idea:
If we are able to solve for an optimal point in a major portion of the feasibility region, this point would in fact be close to the true optimal solution.
We formalize this idea and give an abstract proof of why the ellipsoid method works.
The ellipsoid method is an iterative method. In each step, it gains total control of a part of the feasibility region, by using ellipsoids as a proxy, through halving along subgradients or separating hyperplanes.
Suppose at time
 , the remaining uncontrolled region is written as
, the remaining uncontrolled region is written as
 . This gives us a descending sequence of subsets:
. This gives us a descending sequence of subsets:

As an old adage goes:
To control an onion, all you have to do is to control its peels.
we mathematically express
 , where
, where
 are the peels, and formulate strategies to control
are the peels, and formulate strategies to control
 .
.
Now for each set
, say we have a point
 with either
with either
 , or
, or
 with
with
 , then by taking
, then by taking
 , and assuming
, and assuming
 , we in fact have
, we in fact have
 . For a proof, note that for any
. For a proof, note that for any
 , the volume bounds on
, the volume bounds on
 shows that
shows that
 cannot contain
for large enough
, while we have:
cannot contain
for large enough
, while we have:

The following diagram might be useful for navigating the definitions and symbols (coutesy to draw.io)
In optimization, we are also interested in the question of the speed of convergence. By using the same idea for estimation, we see that it depends on
 . In ellipsoid methods - as one can guess it - these are given by manipulations with ellipsoids; in center of gravity methods, these are given by other means.
. In ellipsoid methods - as one can guess it - these are given by manipulations with ellipsoids; in center of gravity methods, these are given by other means.
It is now (finally 😅) the time to introduce the ellipsoid algorithm. The steps are as follows:
 ,
,
 ,
,
 ,
,

 , call separation oracle for a nonzero direction
, call separation oracle for a nonzero direction
 , so that
, so that

 . If
. If
 , optimality condition reached, terminate. Otherwise continue.
, optimality condition reached, terminate. Otherwise continue. via the explicit formulas in the next section, to have the properties:
via the explicit formulas in the next section, to have the properties:

 and update:
and update: to be the new center of this ellipsoid.
to be the new center of this ellipsoid. the argmin of
the argmin of
 if
if
 ; else set to
; else set to
 .
. .
. .
.Note that the sets
and points
 then satisfies the settings we previously introduced that will lead to convergence. With a bit of algebra, one has the following:
then satisfies the settings we previously introduced that will lead to convergence. With a bit of algebra, one has the following:
Ellipsoid Method: Feasibility and Convergence
For
 , we have
, we have
 , with:
, with:

A bit of interpretation on this result, which would illustrate some cool characteristics of this algorithm:
 is
is
 , from a black-box optimization perspective.
, from a black-box optimization perspective. ), but each time step requires the computation of a nontrivial integral, in which in the most easy cases exact solvers still needs exponential computation time.
), but each time step requires the computation of a nontrivial integral, in which in the most easy cases exact solvers still needs exponential computation time.Now let us look at some technical tools and results that allow us to work with ellipsoids, tying together the lose ends introduced in the algorithm above.
It is just a brief note on how the math is done, leaving out much of the book-keeping and formula derivations. For even more casual readers, you have already understand what ellipsoid method does🎉!
An ellipsoid
 is an affine image of
is an affine image of
 . It can be represented as:
. It can be represented as:

where
 is SPD (symmetric positive definite) (assuming it having positive volume), admitting a decomposition
is SPD (symmetric positive definite) (assuming it having positive volume), admitting a decomposition
 ; such
; such
 then describes
then describes
 as
as
 , hence an ellipsoid.
, hence an ellipsoid.
Here is a fun problem in geometry:
Question
Given an ellipsoid with positive volume
 , a direction
, how small an ellipsoid (in terms of volume)
, a direction
, how small an ellipsoid (in terms of volume)
 can we find so that it encloses the halved ellipsoid
can we find so that it encloses the halved ellipsoid
 ?
?
The case
 is trivial, so we assume
is trivial, so we assume
 .
.
It would be illustrative to work out the case where
 , and
, and
 , then map it back using
, then map it back using
 . We want
. We want
 and
and
 lie in
lie in
 , so we define:
, so we define:

with
 ; note that
; note that
 ,
,
 for
for
 . By this requirement, we formulate the optimization problem:
. By this requirement, we formulate the optimization problem:


After expressing
 via
, we have by calculus that the optimal point is
via
, we have by calculus that the optimal point is
 with value:
with value:

After taking account the rescaling of
 and the remapping of points
and the remapping of points
 , we get:
, we get:
Ellipsoid Update Formula
For
 , we get:
, we get:
 where:
where:

Bubeck, Sébastien. “Convex optimization: Algorithms and complexity.” Foundations and Trends® in Machine Learning 8.3-4 (2015): 231-357. ↩︎